Current Projects
Visible Pedestrians: Level of Detail in Pedestrian Detection Systems
Collaboration: NYU's HumanFUEL and UT-Austin's Mobility Systems Laboratory
Pedestrian detection systems in Level 3 automated vehicles can provide varying levels of information detail to drivers, but optimal information granularity remains unclear. This study examines how different levels of detail (LOD0-LOD4) in pedestrian detection displays affect driver attention allocation, trust in automation, and situational awareness during mixed-traffic scenarios. Using a vehicle simulator with eye tracking capabilities (Meta Aria Gen1 glasses), participants complete driving tasks while monitoring pedestrian detection displays ranging from no information (LOD0) to comprehensive displays including position, orientation, and uncertainty visualization (LOD4). Eye tracking provides objective measurement of attention allocation between road monitoring and display interaction, while subjective measures assess trust calibration and cognitive load. Results establish optimal information granularity for pedestrian detection interfaces that balance information utility with attention demands in Level 3 automated driving contexts.
Virtual Worlds for Real Agents: Inter-block Way-finding in Strategic-level Pedestrian Behavior
Collaboration: NYU's HumanFUEL and Cornell Tech's Interaction Research Lab
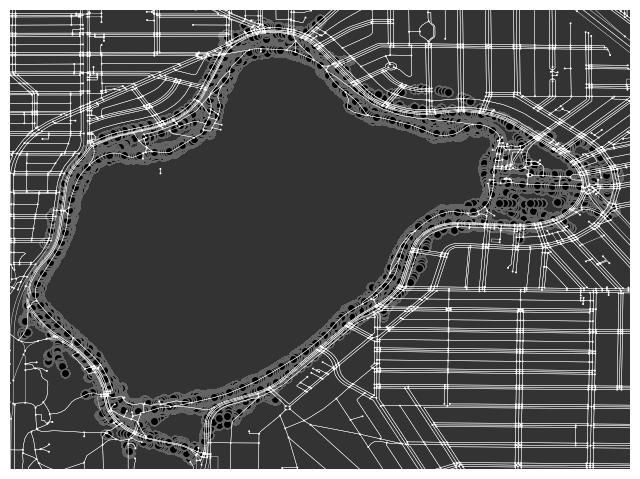
Virtual reality environments provide controlled settings for pedestrian behavior research, but their correspondence to real-world behavior requires thorough validation. This study compares VR walking behavior to naturalistic pedestrian traces collected at the same physical location in South Lake Union, Seattle. Participants complete utility-based (goal-directed bus catching) and non-utility (exploratory bus stop search) navigation tasks in VR that match naturalistic behavior classifications. Validation employs the Hoogendoorn behavioral hierarchy framework, measuring correspondence across strategic (task completion patterns), tactical (route choice, navigation strategies), and operational (speed, trajectory, movement patterns) levels. Comprehensive assessment protocols include motion sickness monitoring (VRSQ), cognitive workload evaluation (NASA-TLX), and presence measurement (IPQ) to ensure ecological validity. Results establish validity benchmarks and provide calibration factors for VR pedestrian research. This 45-minute protocol demonstrates systematic validation of virtual pedestrian environments against real-world baselines.
Objectives:
- Validate VR pedestrian behavior against naturalistic traces by comparing navigation patterns across behavioral hierarchy levels
- Assess virtual-to-real correspondence for utility-based versus non-utility pedestrian tasks
- Establish validity benchmarks and calibration factors for pedestrian-aware virtual environments
Pedestrian Exposure for Crash Prediction
Funded by: National Highway Traffic Safety Administration (NHTSA)
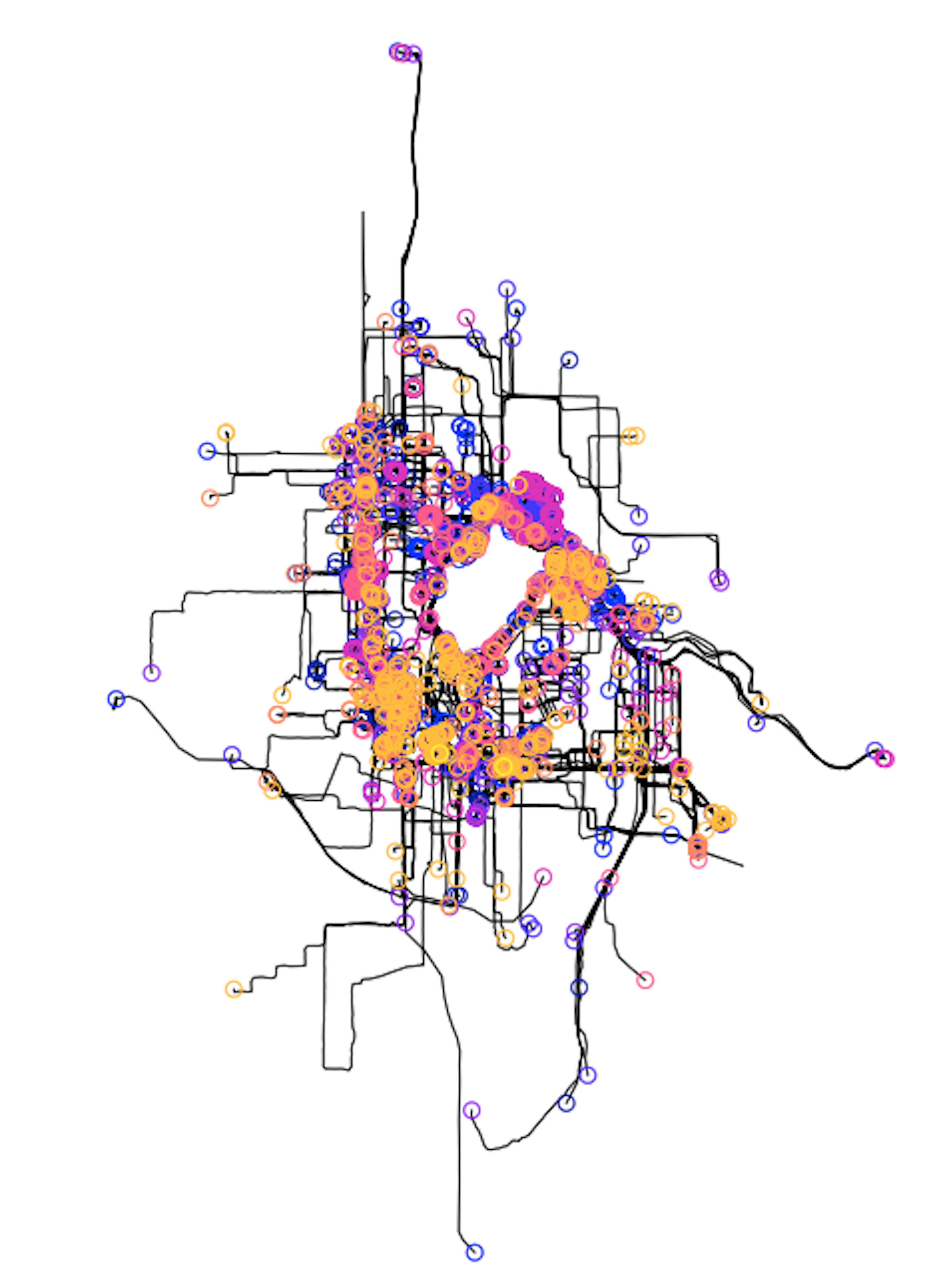
Abstract: Pedestrian safety in urban environments remains a critical challenge, with U.S. cities experiencing a dramatic 60% increase in pedestrian fatalities over the past decade. To address this crisis, we're developing more sophisticated crash prediction models that incorporate detailed measures of pedestrian exposure to environmental risk. Our approach focuses on tracking pedestrian path-planning behaviors within microenvironments and analyzing their relationship to vehicle crash incidents at intersections. By incorporating granular data about pedestrian activity levels and environmental factors, we aim to create more accurate predictions of collision risk. The rarity of pedestrian-vehicle crashes, while fortunate, presents a significant challenge for developing preventative measures. Our research addresses this by establishing robust geospatial estimates of pedestrian activity as a proxy measure for crash likelihood—acknowledging that areas with higher pedestrian activity naturally face increased crash potential. Through this work, we're advancing both the performance of intersection-level crash predictions and developing a systematic framework for analyzing prediction model misclassifications, ultimately contributing to the design of safer urban spaces.

Sim2Sim: Virtualized mixed-traffic driving environments with human regulated RL agents
Abstract: Reinforcement learning methods are useful for training agency in unknown state spaces and previously unseen environments. Model-free adaptivity produces trained agents that can perform in real-world environments not exactly mimicking previous training environments. However, deploying these algorithms on-line in real-world traffic environments is still relatively nonexistant due to potential safety implications for both the in-vehicle driver and other road users (ORUs). Therefore, this project proposes a sim-to-sim transfer: previously trained human regularized RL agents (HR-PPO) are deployed into an multiplayer experimentation setting (Strangeland) to interact with driving and walking participants. This approach can validate and fine-tune RL agent training in a context-rich setting.

JAYWALK: Unregulated pedestrian behavior in mixed-traffic driving environments
Funded by: National Science Foundation (NSF) - GermanXUS research exchange
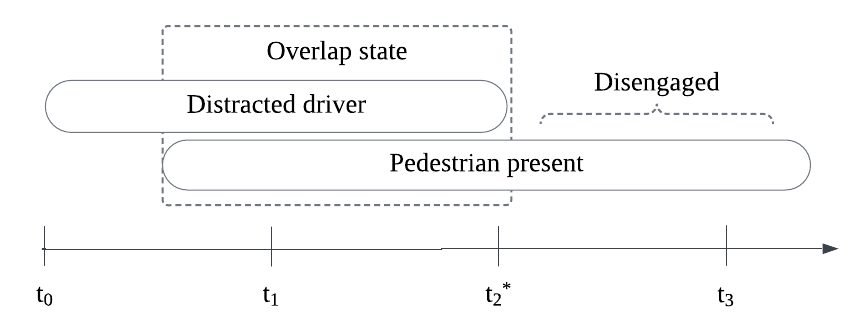
Abstract: With pedestrians constituting 23% of global road traffic fatalities in 2021, understanding cross-cultural behavioral patterns is critical for developing adaptive safety systems. Predicting pedestrian behavior remains challenging due to their dynamic movement patterns and variable adherence to traffic regulations.In addition, the development of autonomous vehicle systems face significant limitations in replicating human communication protocols that typically resolve ambiguous traffic situations. This is evidenced by incident data showing autonomous vehicle accidents predominantly occur during automated operation involving unexpected pedestrian actions. Through systematic analysis of pedestrian behavior at signalized intersections, this research aims to inform both the development of culturally-adaptive autonomous systems and the implementation of more effective urban infrastructure across diverse societal contexts.

Multimodal Environments & Multitasking Driving Behaviors
Funded by: Federal Highway Administration (FHWA)
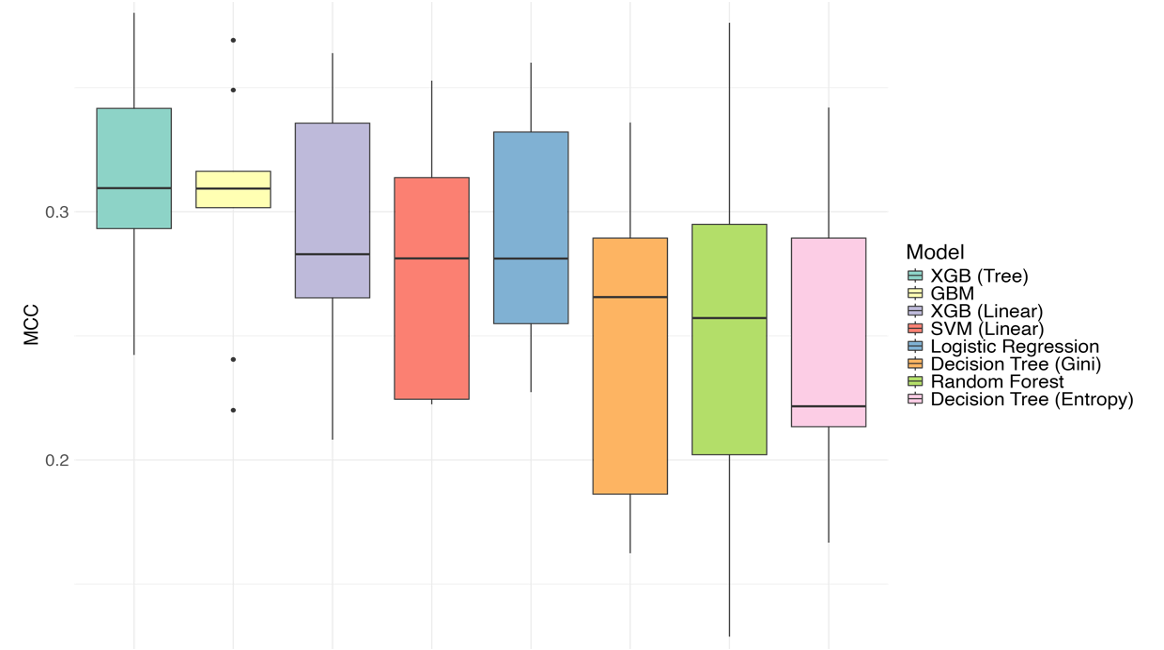
Abstract: With over 42,000 roadway fatalities in 2022 and research showing that drivers spend roughly 50% of their time engaged in non-driving tasks, understanding driver behavior in complex environments is crucial. Our project leverages the largest naturalistic driving study to date (SHRP2 NDS) to examine how drivers multitask in multimodal urban environments. By analyzing 19 urban locations with pedestrian and cyclist infrastructure, we investigate driver engagement in secondary tasks while interacting with vulnerable road users. Our analysis integrates three key data sources: video recordings of driver behavior and urban environments, vehicle kinematics (speed, acceleration), and anonymized demographic information. Using mixed-effect binary logistic regression and Bayesian network models, we identified significant patterns in driver behavior around crosswalks and bike treatments. The Bayesian networks, particularly valuable for modeling complex systems with uncertain relationships, reveal conditional dependencies between variables that could inform both infrastructure design and Advanced Driver Assist System (ADAS) development to enhance road safety for all users.
The Mode Choice Should be my Choice!
Abstract: In response to rising VRU deaths in dense urban settings, and increased support for complete street designs, this project examines the relationship between mode choice and the surrounding built environment. This projects uses New York City as a living lab: mode choice data and trip purpose are from the Regional Establishment Survey (RES), and GIS-linked built environment features (i.e, high-visibility crosswalks, average roadway width, slow-speed zone) are provided by the NYC Open Data Portal. A mixed logit model is developed to compare individual heterogeneity in soft, mass, and personal (vehicle) mode choices with local built environment support for observed choices. Sociodemographics such as age, income, and mobility status are also considered. An alternative-specific travel time variable is considered, and a more thorough discussion of mode choice elasticity to changes in the local microenvironment is provided.
The Next Mobile Office: How will we Work in Self-Driving Cars?
Funded by: National Science Foundation (NSF)
Abstract: This research project explores the intersection of Advanced Driver Assistance Systems (ADAS) and mobile work environments. Participants are asked to manually control the vehicle in a simulated two-lane rural road environment, and then engage a Level 3 ADAS and join a pre-recorded virtual meeting discussing and revising presentation slides. The participant is queued engaging questions about the meeting task, but are presented with a take-over scenario (participant must regain control of the vehcile). The research aims to understand how meeting participation and engagement impact a driver's takeover timing in autonomous vehicles, while also examining the reciprocal effects of takeover scenarios on meeting performance, with participants completing a pre- and post-drive survey to capture their overall trust in the automation. This study utilizes the NADS miniSim vehicle simulator to create a controlled environment for investigating the complex dynamics between virtual work engagement and autonomous system safety protocols.

Cross-cultural mapping of older drivers
Funded by: National Science Foundation (NSF)
Abstract: Older drivers face unique challenges that can contribute to age-related accidents, prompting our research into developing sociodemographic profiles to enhance in-vehicle support systems. Building comprehensive naturalistic driving databases is both time-intensive and costly, which led us to explore an innovative approach: mapping driving profiles across different databases that share similar sociodemographic features but represent distinct populations. By bridging the Strategic Highway Research Program (SHRP2) naturalistic driving database with the Survey of Health, Aging, and Retirement in Europe (SHARE), we identify personal characteristics that allow us to examine how the choice to continue driving becomes a deeply contextual decision, shaped by one's cultural and geographic environment.
Measuring Pedestrian Exposure Using Electronic Devices
Funded by: National Highway Traffic Safety Administration (NHTSA)
Abstract: Crashes involving pedestrians continue to be a serious problem in the United States and represent 15% of all traffic collisions. Pedestrians are among the most vulnerable road users. In 2020, pedestrians accounted for 6,516 fatalities and an estimated 54,769 injuries in motor vehicle crashes. Over the last decade, the U.S. has seen a 46% increase in pedestrian fatalities, now representing 17% of all motor vehicle related crash fatalities (NHTSA, 2022). In response to the increased number of fatalities and the increased emphasis on vulnerable road modes (walking, cycling) as healthy transportation options, many localities are looking for ways to make walking safer. One of the challenges to developing and implementing effective pedestrian safety countermeasures is establishing a consistent and reliable estimate of the number of pedestrians at risk in a given spatiotemporal slice. This project operationalizes a pedestrian exposure measure from personal electronic device data (GSP, accelerometer) collected at a weeks time from over 700 participants throughout a 4-year period.

